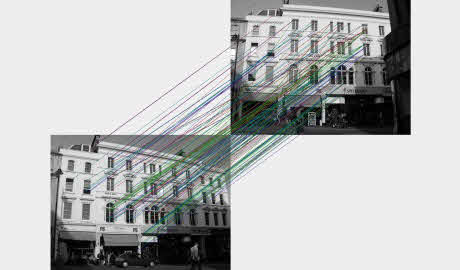
At the moment we are working on fast and robust local feature detectors and descriptors, supported by a HP Labs Innovation Research Award for Dr Walterio Mayol-Cuevas’ proposal titled ‘Anywhere Authoring using Interactive Computer Vision and Mobile Sensors’.