Browse Computational Geometry projects
– 3D reconstruction, image matting
– Category discovery and visual correspondence
– Photometric stereo
Browse other research categories
Archive
We aim to design algorithms that enable the machine to understand our visual world from both geometric and semantic aspects, by studying topics like visual correspondence, 3D reconstruction, image matting, photometric stereo, novel category discovery, semi-supervised learning, self-supervised learning, etc.
3D reconstruction, image matting
Reconstructing a 3D model of an object from its 2D images has always been a hot topic in the field of computer vision. It has many important applications in robotics, augmented reality, video games, movie production, reverse engineering, etc. Image matting refers to the process of extracting the foreground matte of an image by locating the region of the foreground object and estimating the opacity of each pixel inside the foreground region. Image matting has been widely used in image editing and film production.
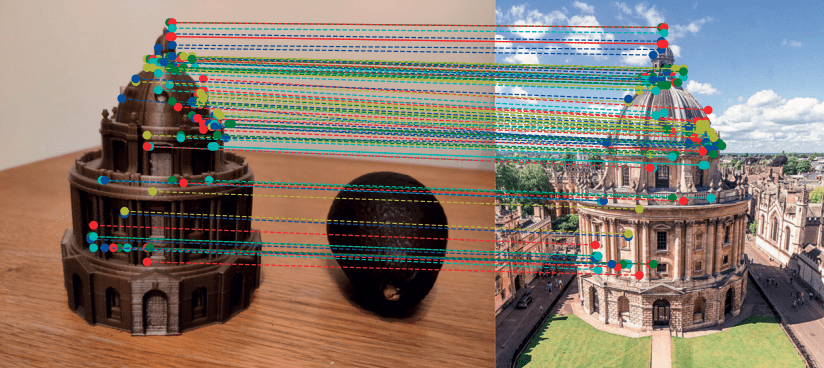
Category discovery and visual correspondence
Modern machine learning methods have little to offer in an open-world setting, in which image categories are not defined a-priori, or for which no labelled data is available. The study of novel category discovery aims to enable the machine to discover and recognize new categories automatically. Establishing correspondences between a pair of images that shares a common field of view is critical for many important tasks in computer vision such as 3D reconstruction, camera motion estimation, relocalization, etc.
Photometric stereo
Photometric stereo aims at recovering the surface normal of a static object from a set of images captured under different light directions with a fixed camera. Based on the availability of calibrated lighting conditions, photometric stereo can be categorized into calibrated and uncalibrated photometric stereo settings.